En liten påminelse - Cirkel koordinater
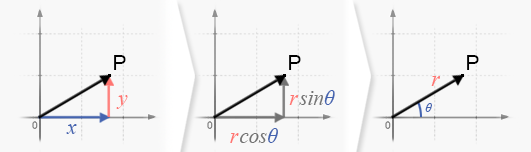
Vi har i föregående exempel använt oss av -koordinater. Men dessa är inte alltid de mest anpassade koordinaterna för att beskriva en partikels rörelse. I vissa fall är det användbart att använda sig av cylinder koordinater. På gymnasiet har ni kanske redan omvandlat en punkts koordinater från x och y koordinater till en vinkel och en radie.
Alltså från till .
Cylinder koordinater
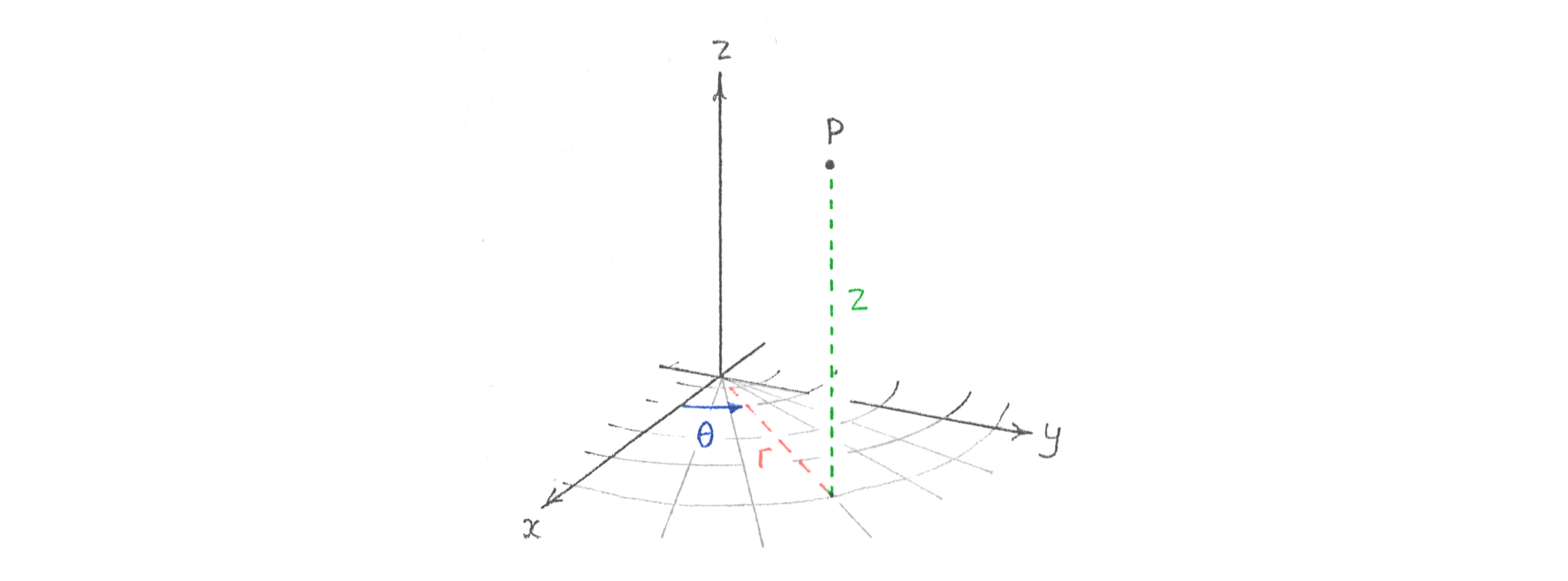
I mekaniska problem I rummet måste vi dock lägga till en dimension. Ett sätt att göra detta är att helt enkelt "höja upp" punkten från -planet, med ett -värde. Man får då en punkt som uttryckts med hjälp av en vinkel , en radie och ett -värde.
Som ni kan se ovan kan man säga att vi beskriver punkten genom att sätta den på en cirkel med radie r vid vinkeln \theta, och sedan "lyfter upp" den med en höjd z. Vi har då beskrivit punkten med så kallade cylinderkoordinater.
Läge, hastighet och acceleration
Nu när vi vet vad cylinderkoordinater är för något, kan vi börja med att prata om ekvationer för dessa. Läget kan då beskrivas som:
där är den radiella enhetsvektorn, och
Utöver dessa finns bland annat en vektor som vi kommer ha användning för:
den transversella enhetsvektorn. Dessa definieras som:
Den radiella enhetsvektorn "pekar??? på var punktens sitter i -planet, den axiella är en byggsten för höjningen/sänkningen av punkten längs z -axeln, och den transversella är tangent med den bildade cirkeln i punkten.
Då var ekvationen för läget klart. Nu när vi vill härleda formlerna för hastighet och acceleration blir det dock lite jobbigt. Som ni redan vet får man hastigheten genom att derivera läget med avseende på tiden, och acceleration genom att derivera hastigheten:
Om ni sneglar på ekvationen för igen kanske ni märker att detta kan bli lite jobbigt. Men det är därför vi har ett helt kapitel tilldelat till det här! Bästa sättet att lära sig dessa formler är att försöka räkna fram de själv. Det är därför nästan bäst att ta upp papper och penna och följa med samtidigt. Använd gärna mycket färger!
Låt oss då börja med att påminna om att att och är vektorer (duh). Om vi vill derivera läget måste vi alltså derivera dessa koordinater var för sig. Notera att beror på tiden. Den skulle till och med kunna skrivas för att göra det tydligare, men som ni kanske anar föredrar man att skriva så lite som möjligt i mekanik, så vi förkortar alltså när vi kan.
Så att det blir mindre hackigt när vi väl ska derivera gör vi lite förebyggande arbete först.
Om vi tar en titt på